
Parts List:
- 2 Round electromagnets (700N 12V 59x34mm) - $22.99 on Amazon
- USB relay board (12V 8 channel) - $14.22 on Amazon
- Linear solenoid electromagnet (60N 12V 10mm) - $24.49 on Amazon
- Latch mechanism
- Rope + rollers
- Mounting hardware (L-shaped main steel plate and 2x L-bracket)
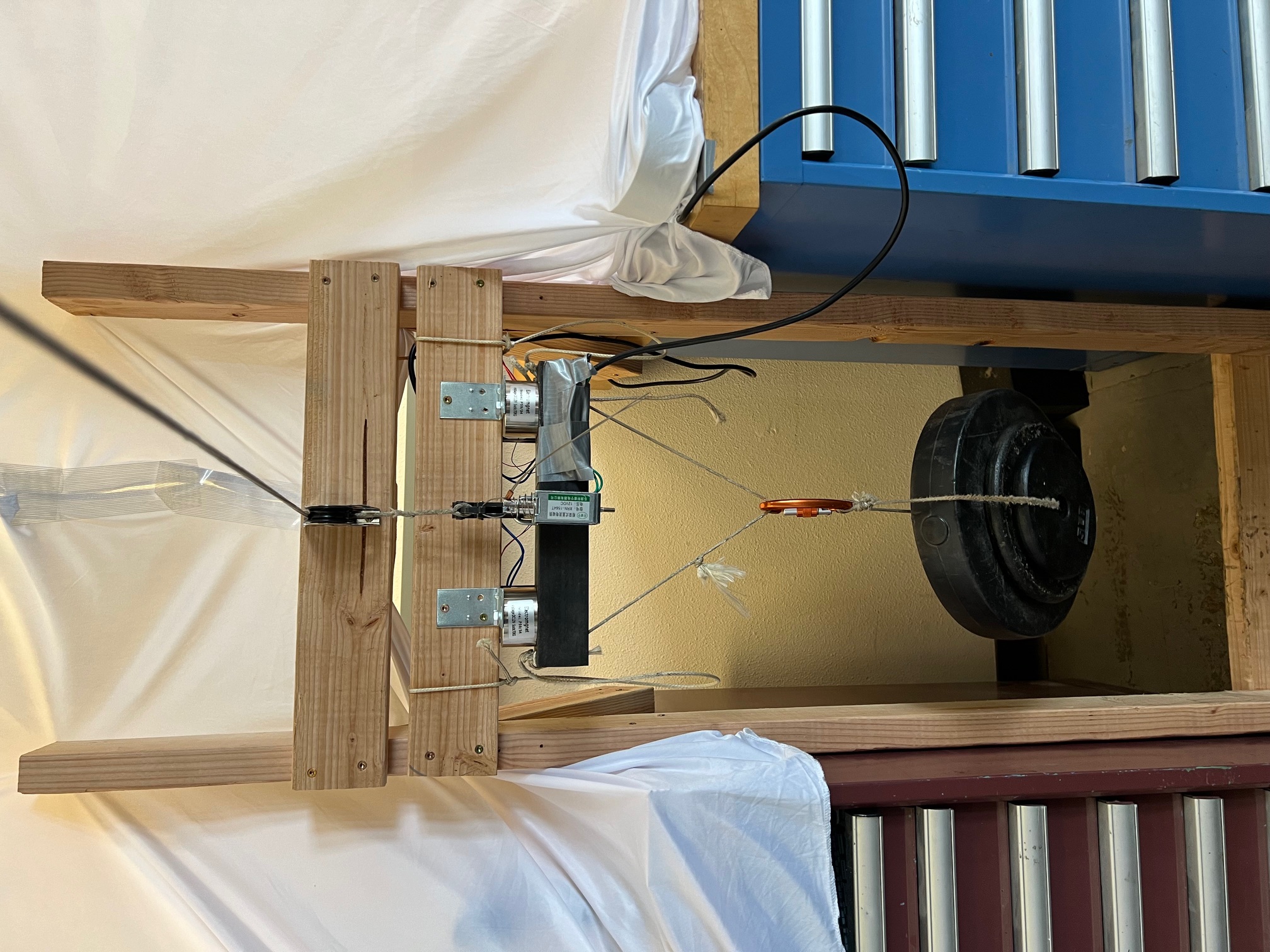
Construction and Operation:
The impulse application device is constructed using two electromagnets controlled by a relay board. The magnets hold a weight in place, and when the electricity to them is cut off, the weight drops, initiating the pull on the robot. A latch mechanism, operated by a solenoid, is incorporated into the design. This solenoid is automatically activated by the same relay board. When the solenoid activates the latch, it disconnects the rope, allowing the robot to move freely again after the impulse has been applied. The relay board is controlled by a Python script running on a lab computer.